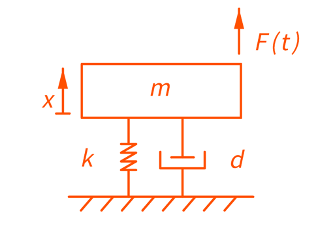
Starting from the equilibrium of the acting forces in the system
FI + FD + FE = F(t)
FI = inertia force [N]
FD = damping force [N]
FE = elastic force [N]
F(t) = excitation force [N]
the differential equation describing the motion of the mass is given by:
mẍ + dẋ + kx = F(t)
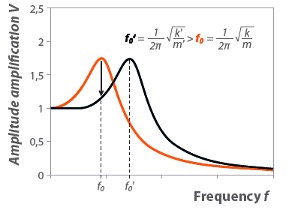
In the case of no external excitation, but an initial displacement of the mass leading to an elastic force of the spring, the solution of the equation describes a free, undamped oscillation – the mass oscillates with its natural angular frequency ωo, i.e., its natural frequency fo=1/2π√(k/m).
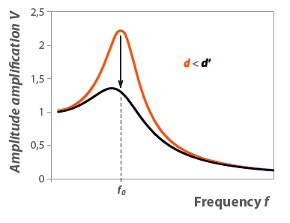
In the case of a sinusoidal (harmonic) excitation force with a frequency f, the change in maximum displacement of the system (amplitude amplification) is given by: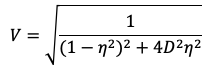
With
η = f/fo
D = Damping
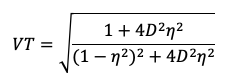
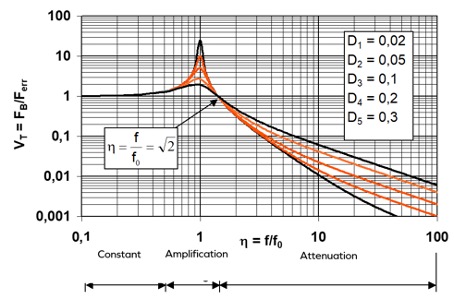
Vibration transmissibility is defined by the ratio of transmitted forces divided by the exciting forces. Fig. 2 shows the transmissibility factor VT = (FB(t) /F(t)) over the tuning factor n. The tuning factor is defined as the ratio of the excitation frequency f divided by the natural frequency f0. It clearly shows that the attenuation of vibration transmission takes place only if the factor is beyond the value of![]()
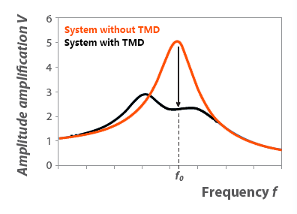
There is no reduction of dynamic forces possible when the natural frequency (= tuning frequency) of a single degree of freedom system (SDOF) is close to or above the relevant excitation frequencies. The dynamical amplification V being the ratio between transmitted and excited force equals:
You need to load content from reCAPTCHA to submit the form. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Facebook. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Instagram. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Google Maps. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Mapbox. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from OpenStreetMap. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Google Maps. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from X. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More Information